
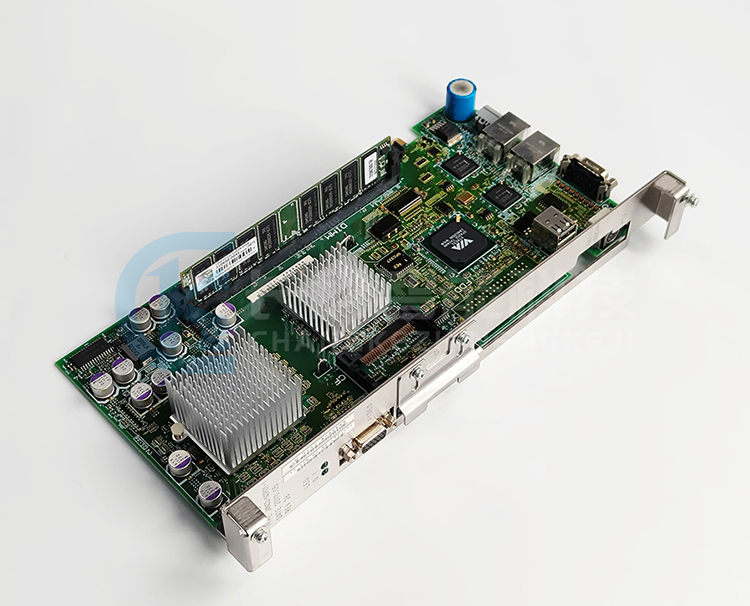
Kawasaki川崎机械手臂控制器CPU主板50999-0137R00


Kawasaki川崎机器人编程常用的方法:
常见的编制方法有两种,示教编程方法和离线编程方法。其中示教编程方法包括示教、编辑和轨迹再现,可以通过示教盒示教和导引式示教两种途径实现。由于示教方式实用性强,操作简便,因此大部分机器人都采用这种方式。离线编程方法是利用计算机图形学成果,借助图形处理工具建立几何模型,通过一些规划算法来获取作业规划轨迹。与示教编程不同,离线编程不与机器人发生关系,在编程过程中机器人可以照常工作。
常见机器人编程指令:
一、列表指令
DIRECTORY指令:此指令的功能是显示存储器中的全部用户程序名。
LISTL指令:功能是显示任意个位置变量值。
LISTP指令:功能是显示任意个用户的全部程序。
二、存储指令
FORMAT指令:执行磁盘格式化。
STOREP指令:功能是在指定的磁盘文件内存储指定的程序。
STOREL指令:此指令存储用户程序中注明的全部位置变量名和变量值。
LISTF指令:指令的功能是显示软盘中当前输入的文件目录。
Tags:
相关产品
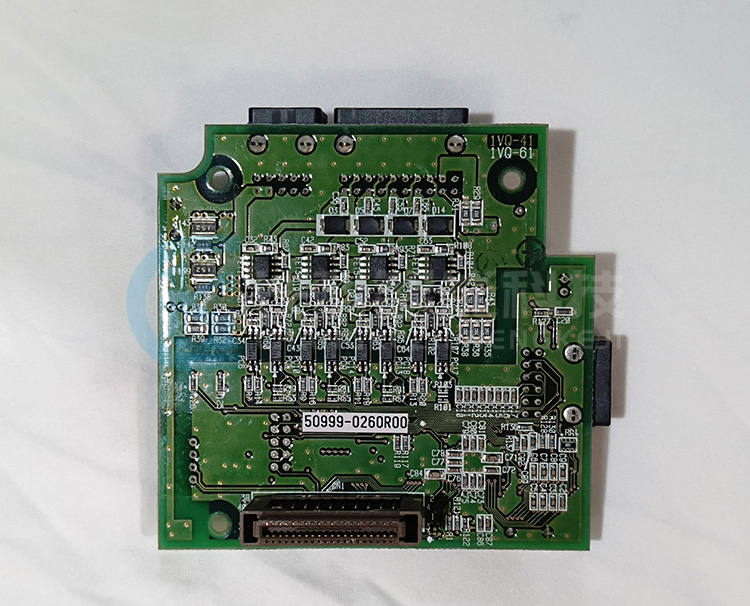
Kawasaki川崎机器人VQ板卡50999-0260RR 2026-03-26
YASKAWA安川机器人NX100控制器CPU控制主板JANCD-NCP01-1 2025-10-15
