
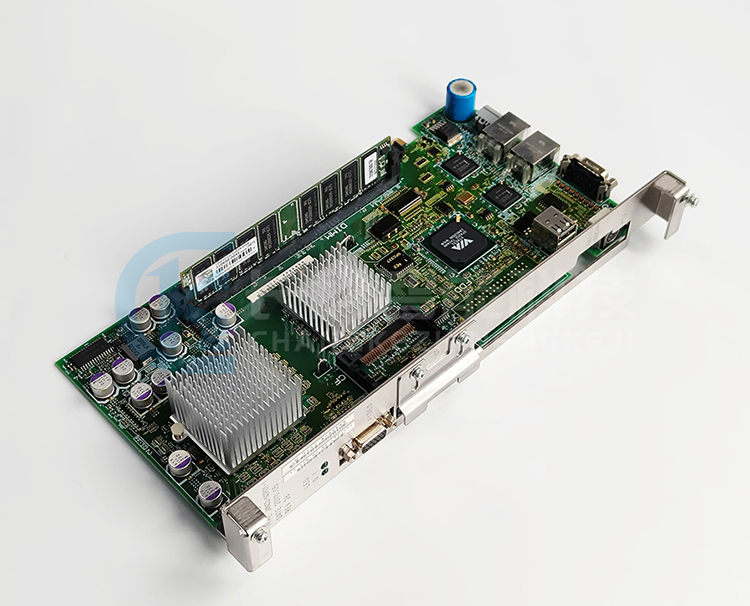
安川DX100机械安全I/F基板JANCD-YIF01-2E



制造业自动化水平提升的特征之一,是工业机器人渗透更深入更细化,为企业提质增效提供关键动力。但编程、部署和控制工业机器人的过程一直以来存在诸多痛点,想要让机器人在产线上按规划地工作,困难重重。传统编程流程下,工程师需要手动规划每一个机器人动作,预设其运行路径,防止发生碰撞,存在高成本、高风险、高耗时的“三高”困扰。

针对传统工业机器人编程的诸多痛点,业界提出了一种基于人工智能的解决方法——无碰撞运动规划技术,其被形象地比作“机器人大脑的运动皮层”。其优化算法能同时管理多个机器人复杂动作,智能生成无碰撞的最优路径方案,达到最佳循环时间。
Tags:
相关产品
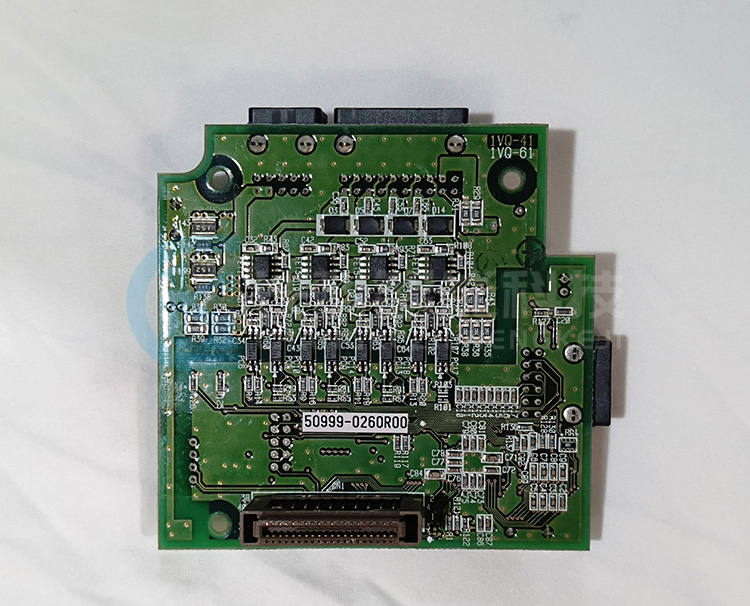
Kawasaki川崎机器人VQ板卡50999-0260RR 2026-03-26
YASKAWA安川机器人NX100控制器CPU控制主板JANCD-NCP01-1 2025-10-15
