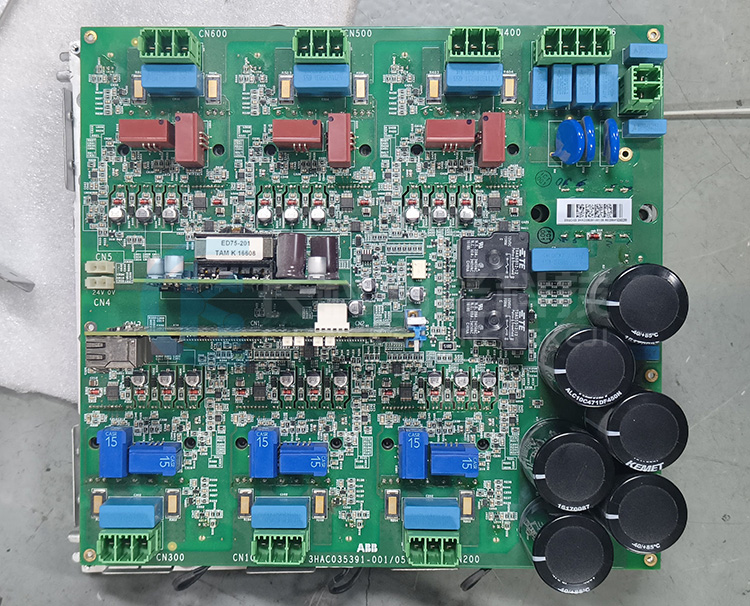
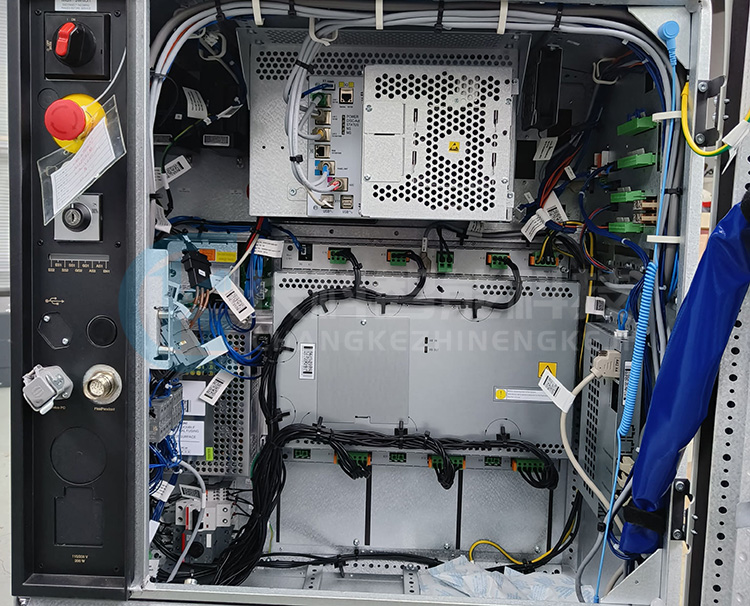
ABB驱动模块DSOC663 3HAC029818-001上机测试检查观察

ABB机器人伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。尤其是应用于控制交流永磁同步电机的伺服驱动器已经成为国内外研究热点。当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置3闭环控制算法。该算法中速度闭环设计合理与否,对于整个伺服控制系统,特别是速度控制性能的发挥起到关键作用。
Tags:
相关产品

尼得科三协玻璃基板移栽机器人SR98SDNFA68碳纤维FORK更换 2026-03-27
ABB机器人控制柜IRC5 Single 3HAC052355-001维修 2026-03-19